Планировщик
Выделяют 3 модели для нарезания вычислений на потоки.
N:1 - несколько пользовательских потоков запущено на едином потоке ядра операционной системы. Этот способ имеет то преимущество, что осуществляется очень быстрое переключение контекстов, но нет возможности воспользоваться преимуществами многоядерных систем.
1:1 - каждый пользовательский поток выполнения совпадает с одним потоком операционной системы. Он использует все ядра автоматически, но переключение контекста происходит медленно, потому что требует прерываний работы операционной системы.
Go пытается взять лучшее из обоих миров с помощью М:N планировщика. При этом произвольное число Go-рутин M планируется на произвольное количество потоков N операционной системы. Этим вы получаете одновременно быстрое переключение контекста, и возможность воспользоваться всеми ядрами в вашей системе. Основным недостатком данного подхода является сложность его включения в планировщик.
Планировщик Go использует 3 основных сущностей:
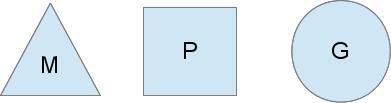
Треугольник представляет поток операционной системы. Выполнением такого потока управляет операционная система, и работает это во многом подобно вашим стандартным потокам POSIX. В исполнимом коде это называется M машиной.
Круг представляет Go-рутину. Он включает стек, указатель команд и другую важную информацию для планирования Go-рутины, такую как канал, который на ней может быть блокирован. В исполнимом коде это обозначается как G.
Прямоугольник представляет контекст планирования. Вы можете понимать его как локализованная версию планировщика, который выполняет код Go-рутин в единственном потоке ядра. Это важная часть, которая позволяет нам уйти от N:1 планировщика к М:N планировщику. Во время выполнения кода контекст обозначается как P для процессора. В общем это и всё, если коротко.
В планировщике Go есть две разные очереди выполнения: глобальная очередь выполнения (GRQ) и локальная очередь выполнения (LRQ). Каждому P присваивается LRQ, который управляет горутинами, назначенными для выполнения в контексте P. Эти горутины по очереди включаются и выключаются из контекста M, назначенного для этого P. GRQ предназначен для горутин, которые не были назначены для P. Существует процесс, чтобы переместить горутины из GRQ в LRQ
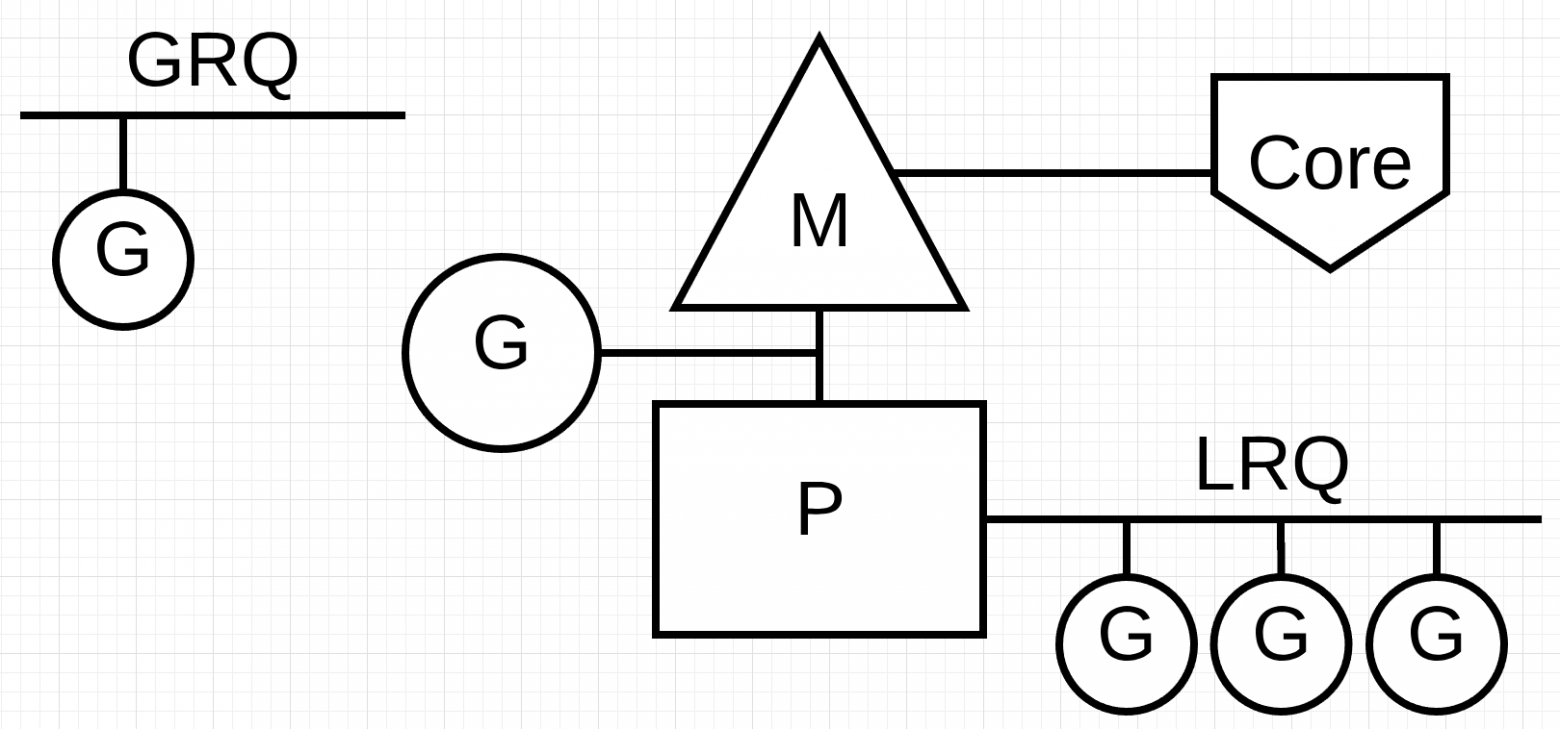
Каждая локальная очередь проверяет глобальную каждый 61 такт процессора.
runtime.schedule() {
// only 1/61 of the time, check the global runnable queue for a G.
// if not found, check the local queue.
// if not found,
// try to steal from other Ps.
// if not, check the global runnable queue.
// if not found, poll network.
}
Это означает, что P будет приоритетнее запускать Goroutines в своем собственном LRQ, затем из LRQ других P, затем из GRQ, затем из сетевого опроса. Существует также небольшой шанс(1/61) немедленно запустить Goroutine из GRQ. Наличие нескольких очередей позволяет построить такую систему приоритетов.
Work stealing
В многопоточных вычислениях, возникли две парадигмы в планировании: делиться задачами (work sharing) и красть задачи (work stealing).
- Work-sharing: Когда процессор генерирует новые потоки, он пытается мигрировать их на другие процессоры, в надежде, что они попадут к простаивающему или недостаточно нагруженному процессору.
- Work-stealing: Недостаточно нагруженный процессор активно ищет потоки других процессоров и "крадет" некоторые из них.
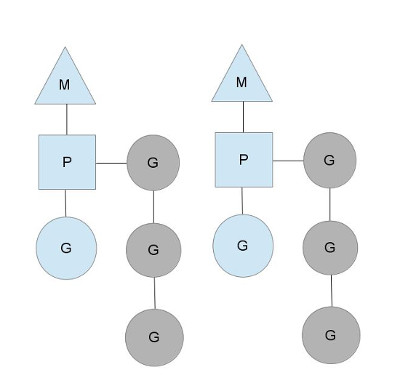
Когда новая G создается или существующая G становится готовой к исполнению, она помещается в локальную очередь готовых к исполнению горутин текущего P. Когда P заканчивается исполнение G, он пытается вытащить (pop) G из своей очереди. Если список пуст, P выбирает случайным образом другой процессор (P) и пытается украсть половину горутин из его очереди.
Вытесняющая многозадачность
Для начала напомню, что такое кооперативная и не кооперативная многозадачность.
С не кооперативной (вытесняющей) многозадачностью мы все с вами прекрасно знакомы на примере планировщика ОС. Данный планировщик работает в фоне, выгружает потоки на основании различных эвристик, а вместо выгруженных процессорное время начинают получать другие потоки.
Для кооперативного планировщика характерно другое поведение — он спит пока одна из горутин явно не разбудит его с намеком о готовности отдать свое место другой. Планировщик далее сам решит, надо ли убирать из контекста текущую горутину, и если да, кого поставить на ее место. Примерно так и работал планировщик GO.
в GO 1.14 изменился принцип работы планировщика, рассмотрим причины по которым эти изменения были сделаны. Взгляните на код:
func main() {
runtime.GOMAXPROCS(1)
go func() {
var u int
for {
u -= 2
if u == 1 {
break
}
}
}()
<-time.After(time.Millisecond * 5) // в этом месте main горутина разбудит планировщик, а он в свою очередь запустит горутину с циклом
fmt.Println("go 1.13 has never been here")
}
Если скомпилировать его с версией GO < 1.14, то строчку «go 1.13 has never been here» вы на экране не увидите. Происходит это потому, что, как только планировщик дает процессорное время горутине с бесконечным циклом, она всецело захватывает P, внутри этой горутины не происходит ни каких вызовов функций, а значит и планировщик мы больше не разбудим. И только явный вызов runtime.Gosched() даст нашей программе завершиться.
В версии до 1.12 runtime Gosched использовал safe-points места, где точно можно вызвать планировщик без боязни, что мы попадем в атомарную для GC секцию кода. Как мы уже говорили, данные safe-points располагаются в прологе функции (но далеко не каждой функции, заметьте). Если вы разбирали go-шный ассемблер, то могли бы возразить — никаких очевидных вызовов планировщика там не видно. Да это так, но вы можете найти там инструкцию вызова runtime.morestack, а если заглянуть внутрь этой функции то обнаружится вызов планировщика.
Асинхронные системные вызовы
Когда операционная система, на которой вы работаете, имеет возможность обрабатывать системный вызов асинхронно, то, что называется network poller, может использоваться для более эффективной обработки системного вызова. Это достигается с помощью kqueue (MacOS), epoll (Linux) или iocp (Windows) в этих соответствующих ОС.
Сетевые системные вызовы могут обрабатываться асинхронно многими операционными системами, которые мы используем сегодня. Именно здесь network poller показывает себя, поскольку его основное назначение — обработка сетевых операций. Используя network poller для сетевых системных вызовов, планировщик может запретить горутинам блокировать M при выполнении этих системных вызовов. Это помогает держать M доступным для выполнения других горутин в LRQ P без необходимости создавать новые M. Это помогает уменьшить нагрузку планирования в ОС.
Дополнительно:
-
https://habr.com/ru/users/not91/publications/articles/
-
https://habr.com/ru/articles/333654/
-
https://habr.com/ru/articles/502506/